
 【模型c++部署】yolov8(检测、分类、分割、姿态)使用openvino进行部署
【模型c++部署】yolov8(检测、分类、分割、姿态)使用openvino进行部署
该文主要是对yolov8的检测、分类、分割、姿态应用使用c++进行dll封装,并进行调用测试。
# 0. 模型准备
openvino调用的是xml和bin文件(下面的推理方式只需要调用xml的文件就行,另外一篇(链接 (opens new window))使用xml和bin文件调用的)。 文件的获取过程(yolov8是pytorch训练的): pt->onnx->openvino(xml和bin)
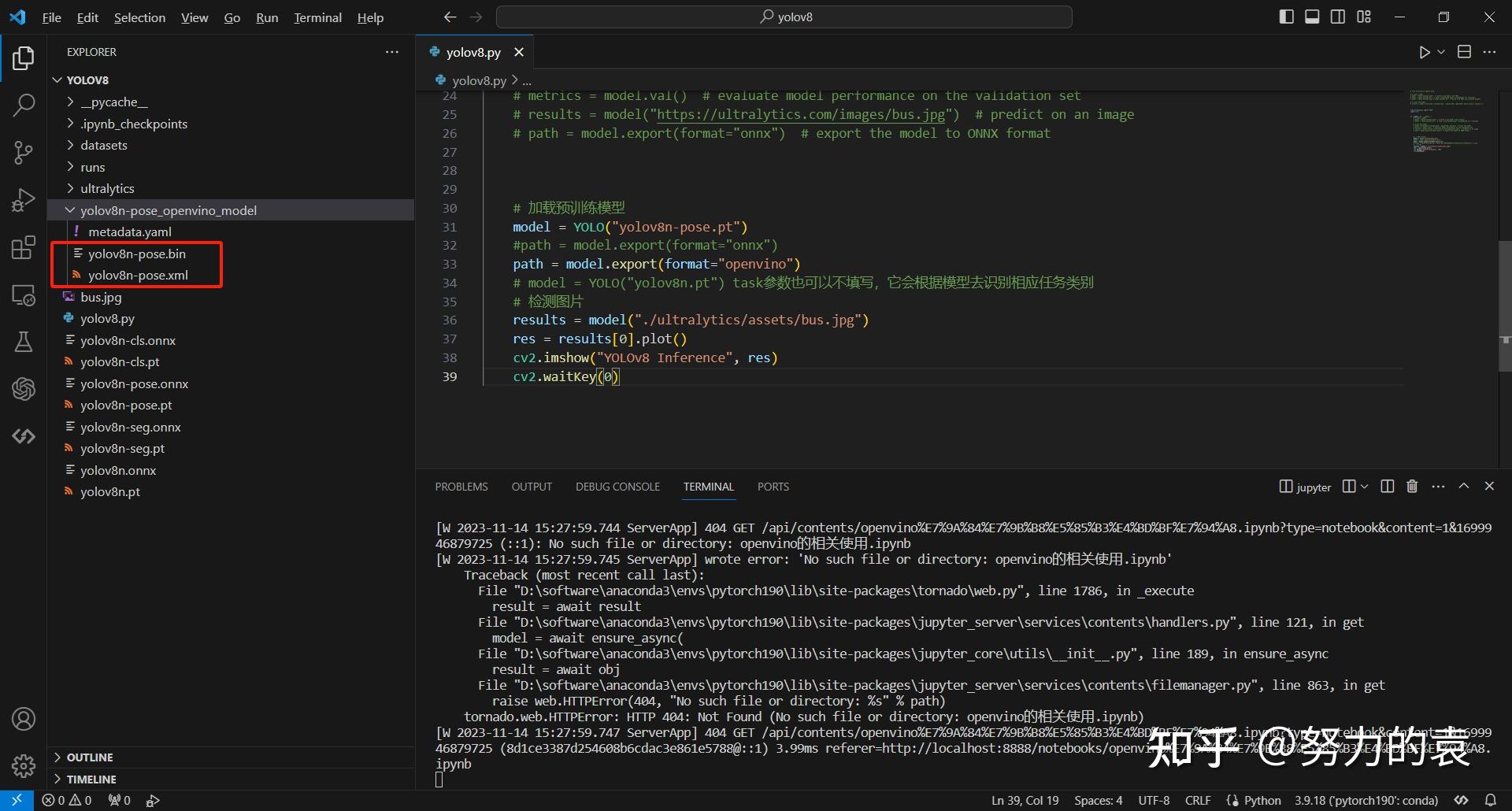
# 方法一:(使用这种,由于版本不一致,推理失败)
使用yolov8自带的代码进行转换,这个过程比较方便,但是对于后续部署其他的模型不太方便。
path = model.export(format="openvino")这行代码可以直接将yolov8n-pose.pt模型转换为xml和bin文件
# 加载预训练模型
model = YOLO("yolov8n-pose.pt")
#path = model.export(format="onnx")
path = model.export(format="openvino")
# model = YOLO("yolov8n.pt") task参数也可以不填写,它会根据模型去识别相应任务类别
# 检测图片
results = model("./ultralytics/assets/bus.jpg")
res = results[0].plot()
cv2.imshow("YOLOv8 Inference", res)
cv2.waitKey(0)
1
2
3
4
5
6
7
8
9
10
11
12
2
3
4
5
6
7
8
9
10
11
12
在这里插入图片描述
# 方法二:
- 使用python的环境进行配置:pip下载方法 (opens new window)

在这里插入图片描述

在这里插入图片描述
主要就是:pip install openvino==2023.1.0
- 使用代码行进行推理 在对应的环境库中找到mo_onnx.py,在终端切换路径到mo_onnx.py的路径下,然后再使用下面的命令。
python mo_onnx.py --input_model D:\Users\6536\Desktop\python\onnx2openvino\yolov8n.onnx --output_dir D:\Users\6536\Desktop\python\onnx2openvino
1
2
2
# 方法三:(推荐这种)
https://zhuanlan.zhihu.com/p/358437476 (opens new window)
# 1. OV_YOLOV8_DLL
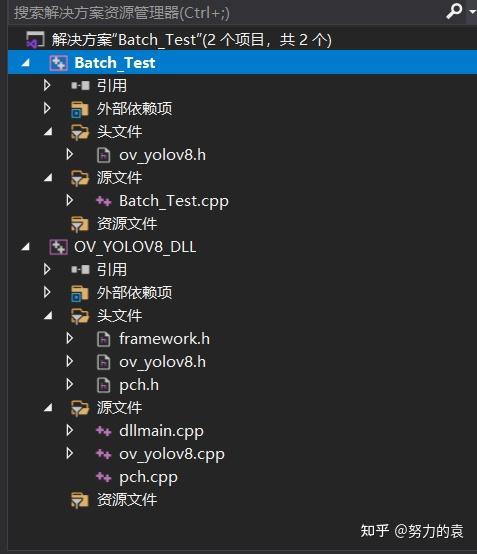
在这里插入图片描述
# 0. c++依赖项配置
主要配置opencv以及openvino openvino的配置:链接 (opens new window) 所以配置截图:
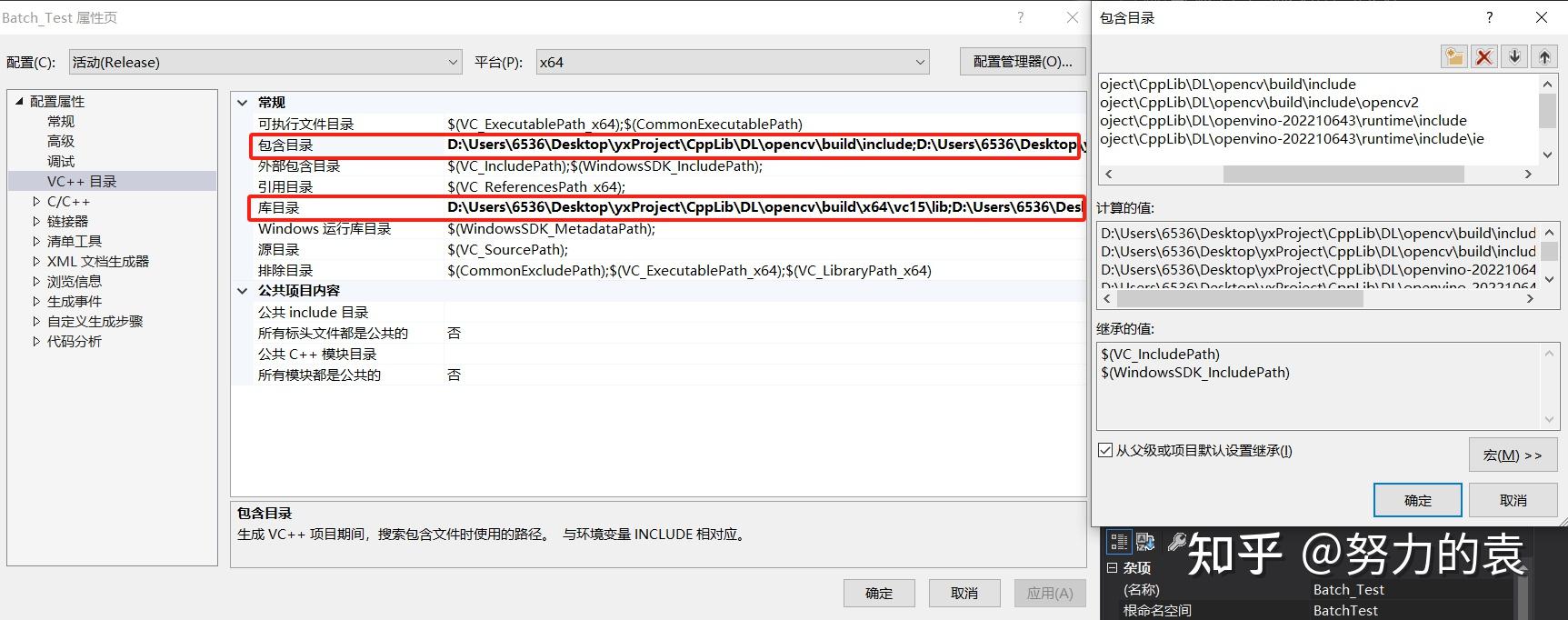
在这里插入图片描述
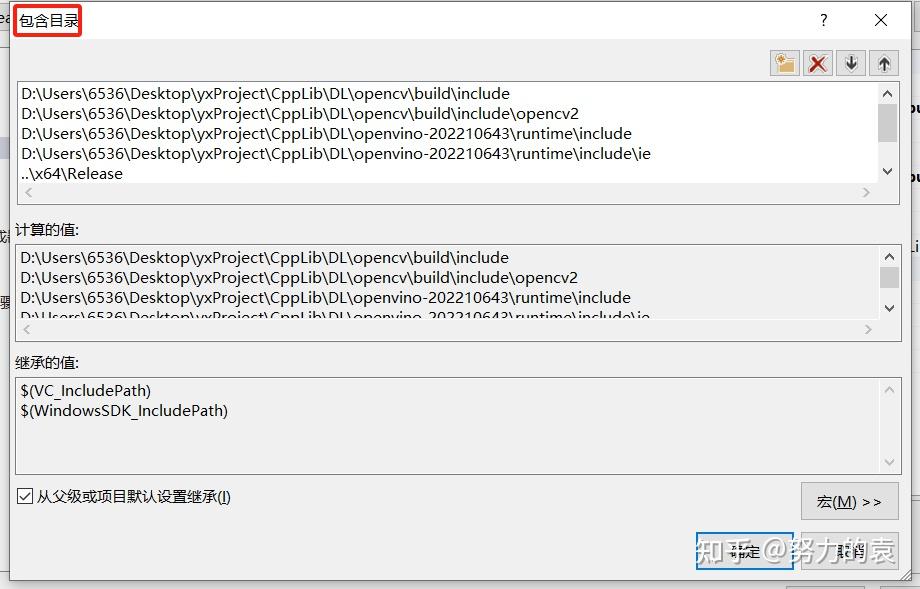
在这里插入图片描述
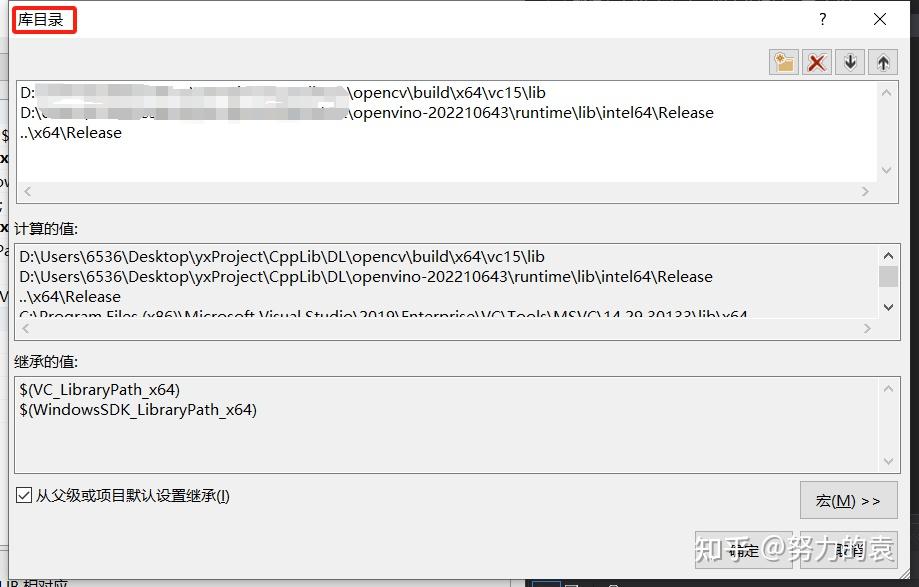
在这里插入图片描述
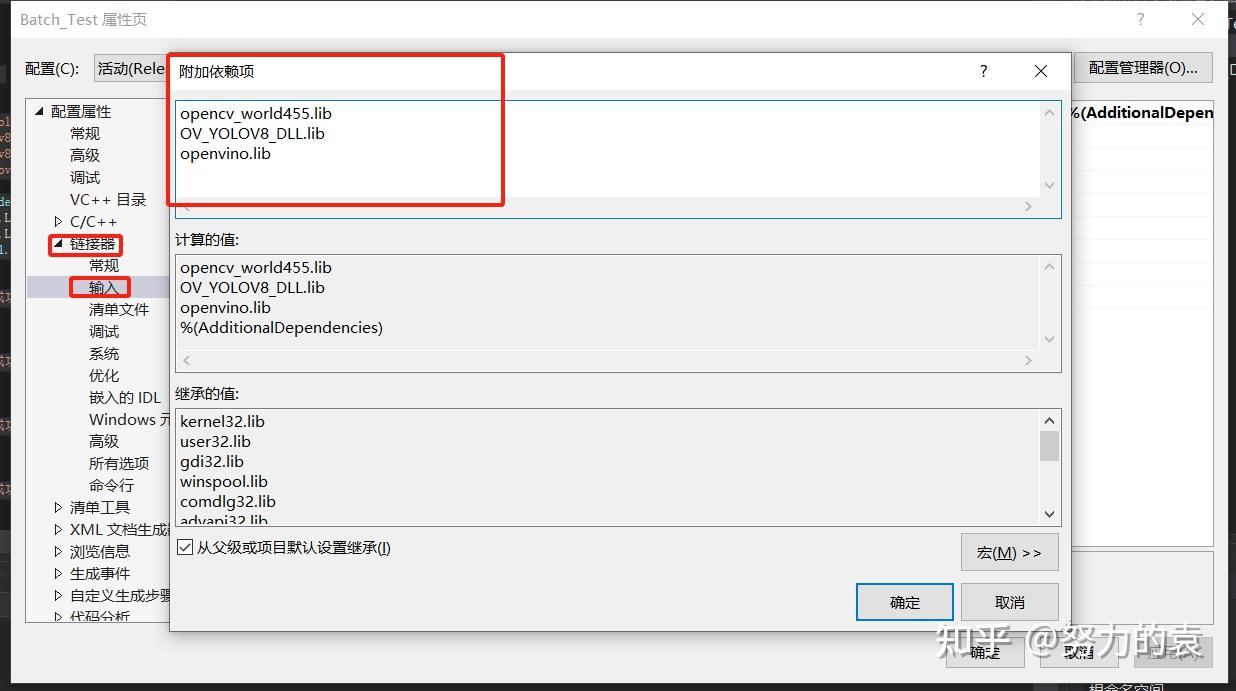
在这里插入图片描述
# 1. ov_yolov8.cpp
#include "ov_yolov8.h"
// 全局变量
std::vector<cv::Scalar> colors = { cv::Scalar(0, 0, 255) , cv::Scalar(0, 255, 0) , cv::Scalar(255, 0, 0) ,
cv::Scalar(255, 100, 50) , cv::Scalar(50, 100, 255) , cv::Scalar(255, 50, 100) };
std::vector<Scalar> colors_seg = { Scalar(255, 0, 0), Scalar(255, 0, 255), Scalar(170, 0, 255), Scalar(255, 0, 85),
Scalar(255, 0, 170), Scalar(85, 255, 0), Scalar(255, 170, 0), Scalar(0, 255, 0),
Scalar(255, 255, 0), Scalar(0, 255, 85), Scalar(170, 255, 0), Scalar(0, 85, 255),
Scalar(0, 255, 170), Scalar(0, 0, 255), Scalar(0, 255, 255), Scalar(85, 0, 255) };
// 定义skeleton的连接关系以及color mappings
std::vector<std::vector<int>> skeleton = { {16, 14}, {14, 12}, {17, 15}, {15, 13}, {12, 13}, {6, 12}, {7, 13}, {6, 7},
{6, 8}, {7, 9}, {8, 10}, {9, 11}, {2, 3}, {1, 2}, {1, 3}, {2, 4}, {3, 5}, {4, 6}, {5, 7} };
std::vector<cv::Scalar> posePalette = {
cv::Scalar(255, 128, 0), cv::Scalar(255, 153, 51), cv::Scalar(255, 178, 102), cv::Scalar(230, 230, 0), cv::Scalar(255, 153, 255),
cv::Scalar(153, 204, 255), cv::Scalar(255, 102, 255), cv::Scalar(255, 51, 255), cv::Scalar(102, 178, 255), cv::Scalar(51, 153, 255),
cv::Scalar(255, 153, 153), cv::Scalar(255, 102, 102), cv::Scalar(255, 51, 51), cv::Scalar(153, 255, 153), cv::Scalar(102, 255, 102),
cv::Scalar(51, 255, 51), cv::Scalar(0, 255, 0), cv::Scalar(0, 0, 255), cv::Scalar(255, 0, 0), cv::Scalar(255, 255, 255)
};
std::vector<int> limbColorIndices = { 9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16 };
std::vector<int> kptColorIndices = { 16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9 };
const std::vector<std::string> class_names = {
"person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light",
"fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow",
"elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard",
"tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple",
"sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch",
"potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone",
"microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear",
"hair drier", "toothbrush" };
YoloModel::YoloModel()
{
}
YoloModel::~YoloModel()
{
}
// =====================检测========================//
bool YoloModel::LoadDetectModel(const string& xmlName, string& device)
{
//待优化,如何把初始化部分进行提取出来
// -------- Step 1. Initialize OpenVINO Runtime Core --------
ov::Core core;
// -------- Step 2. Compile the Model --------
compiled_model_Detect = core.compile_model(xmlName, device);
// -------- Step 3. Create an Inference Request --------
infer_request_Detect = compiled_model_Detect.create_infer_request();
return true;
}
bool YoloModel::YoloDetectInfer(const Mat& src, double cof_threshold, double nms_area_threshold, Mat& dst, vector<Object>& vecObj)
{
// -------- Step 4.Read a picture file and do the preprocess --------
// Preprocess the image
Mat letterbox_img;
letterbox(src, letterbox_img);
float scale = letterbox_img.size[0] / 640.0;
Mat blob = blobFromImage(letterbox_img, 1.0 / 255.0, Size(640, 640), Scalar(), true);
// -------- Step 5. Feed the blob into the input node of the Model -------
// Get input port for model with one input
auto input_port = compiled_model_Detect.input();
// Create tensor from external memory
ov::Tensor input_tensor(input_port.get_element_type(), input_port.get_shape(), blob.ptr(0));
// Set input tensor for model with one input
infer_request_Detect.set_input_tensor(input_tensor);
// -------- Step 6. Start inference --------
infer_request_Detect.infer();
// -------- Step 7. Get the inference result --------
auto output = infer_request_Detect.get_output_tensor(0);
auto output_shape = output.get_shape();
std::cout << "The shape of output tensor:" << output_shape << std::endl;
int rows = output_shape[2]; //8400
int dimensions = output_shape[1]; //84: box[cx, cy, w, h]+80 classes scores
// -------- Step 8. Postprocess the result --------
float* data = output.data<float>();
Mat output_buffer(output_shape[1], output_shape[2], CV_32F, data);
transpose(output_buffer, output_buffer); //[8400,84]
float score_threshold = 0.25;
float nms_threshold = 0.5;
std::vector<int> class_ids;
std::vector<float> class_scores;
std::vector<Rect> boxes;
// Figure out the bbox, class_id and class_score
for (int i = 0; i < output_buffer.rows; i++) {
Mat classes_scores = output_buffer.row(i).colRange(4, 84);
Point class_id;
double maxClassScore;
minMaxLoc(classes_scores, 0, &maxClassScore, 0, &class_id);
if (maxClassScore > score_threshold) {
class_scores.push_back(maxClassScore);
class_ids.push_back(class_id.x);
float cx = output_buffer.at<float>(i, 0);
float cy = output_buffer.at<float>(i, 1);
float w = output_buffer.at<float>(i, 2);
float h = output_buffer.at<float>(i, 3);
int left = int((cx - 0.5 * w) * scale);
int top = int((cy - 0.5 * h) * scale);
int width = int(w * scale);
int height = int(h * scale);
boxes.push_back(Rect(left, top, width, height));
}
}
//NMS
std::vector<int> indices;
NMSBoxes(boxes, class_scores, score_threshold, nms_threshold, indices);
// -------- Visualize the detection results -----------
dst = src.clone();
for (size_t i = 0; i < indices.size(); i++) {
int index = indices[i];
int class_id = class_ids[index];
rectangle(dst, boxes[index], colors[class_id % 6], 2, 8);
std::string label = class_names[class_id] + ":" + std::to_string(class_scores[index]).substr(0, 4);
Size textSize = cv::getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, 0);
Rect textBox(boxes[index].tl().x, boxes[index].tl().y - 15, textSize.width, textSize.height + 5);
cv::rectangle(dst, textBox, colors[class_id % 6], FILLED);
putText(dst, label, Point(boxes[index].tl().x, boxes[index].tl().y - 5), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 255, 255));
}
return true;
}
// =====================分类========================//
bool YoloModel::LoadClsModel(const string& xmlName, string& device)
{
//待优化,如何把初始化部分进行提取出来
// -------- Step 1. Initialize OpenVINO Runtime Core --------
ov::Core core;
// -------- Step 2. Compile the Model --------
compiled_model_Detect_Cls = core.compile_model(xmlName, device);
// -------- Step 3. Create an Inference Request --------
infer_request_Cls = compiled_model_Detect_Cls.create_infer_request();
return true;
}
bool YoloModel::YoloClsInfer(const Mat& src, double cof_threshold, double nms_area_threshold, Mat& dst, vector<Object>& vecObj)
{
// -------- Step 4.Read a picture file and do the preprocess --------
// Preprocess the image
Mat letterbox_img;
letterbox(src, letterbox_img);
float scale = letterbox_img.size[0] / 640.0;
Mat blob = blobFromImage(letterbox_img, 1.0 / 255.0, Size(224, 224), Scalar(), true);
// -------- Step 5. Feed the blob into the input node of the Model -------
// Get input port for model with one input
auto input_port = compiled_model_Detect_Cls.input();
// Create tensor from external memory
ov::Tensor input_tensor(input_port.get_element_type(), input_port.get_shape(), blob.ptr(0));
// Set input tensor for model with one input
infer_request_Cls.set_input_tensor(input_tensor);
// -------- Step 6. Start inference --------
infer_request_Cls.infer();
// -------- Step 7. Get the inference result --------
auto output = infer_request_Cls.get_output_tensor(0);
auto output_shape = output.get_shape();
std::cout << "The shape of output tensor:" << output_shape << std::endl;
// -------- Step 8. Postprocess the result --------
float* output_buffer = output.data<float>();
std::vector<float> result(output_buffer, output_buffer + output_shape[1]);
auto max_idx = std::max_element(result.begin(), result.end());
int class_id = max_idx - result.begin();
float score = *max_idx;
std::cout << "Class ID:" << class_id << " Score:" << score << std::endl;
return true;
}
// =====================分割========================//
bool YoloModel::LoadSegModel(const string& xmlName, string& device)
{
//待优化,如何把初始化部分进行提取出来
// -------- Step 1. Initialize OpenVINO Runtime Core --------
ov::Core core;
// -------- Step 2. Compile the Model --------
compiled_model_Seg = core.compile_model(xmlName, device);
// -------- Step 3. Create an Inference Request --------
infer_request_Seg = compiled_model_Seg.create_infer_request();
return true;
}
bool YoloModel::YoloSegInfer(const Mat& src, double cof_threshold, double nms_area_threshold, Mat& dst, vector<Object>& vecObj)
{
// -------- Step 4.Read a picture file and do the preprocess --------
// Preprocess the image
Mat letterbox_img;
letterbox(src, letterbox_img);
float scale = letterbox_img.size[0] / 640.0;
Mat blob = blobFromImage(letterbox_img, 1.0 / 255.0, Size(640, 640), Scalar(), true);
// -------- Step 5. Feed the blob into the input node of the Model -------
// Get input port for model with one input
auto input_port = compiled_model_Seg.input();
// Create tensor from external memory
ov::Tensor input_tensor(input_port.get_element_type(), input_port.get_shape(), blob.ptr(0));
// Set input tensor for model with one input
infer_request_Seg.set_input_tensor(input_tensor);
// -------- Step 6. Start inference --------
infer_request_Seg.infer();
// -------- Step 7. Get the inference result --------
auto output0 = infer_request_Seg.get_output_tensor(0); //output0
auto output1 = infer_request_Seg.get_output_tensor(1); //otuput1
auto output0_shape = output0.get_shape();
auto output1_shape = output1.get_shape();
std::cout << "The shape of output0:" << output0_shape << std::endl;
std::cout << "The shape of output1:" << output1_shape << std::endl;
// -------- Step 8. Postprocess the result --------
Mat output_buffer(output1_shape[1], output1_shape[2], CV_32F, output1.data<float>()); // output_buffer 0:x 1:y 2 : w 3 : h 4--84 : class score 85--116 : mask pos
Mat proto(32, 25600, CV_32F, output0.data<float>()); //[32,25600] 1 32 160 160
transpose(output_buffer, output_buffer); //[8400,116]
std::vector<int> class_ids;
std::vector<float> class_scores;
std::vector<Rect> boxes;
std::vector<Mat> mask_confs;
// Figure out the bbox, class_id and class_score
for (int i = 0; i < output_buffer.rows; i++) {
Mat classes_scores = output_buffer.row(i).colRange(4, 84);
Point class_id;
double maxClassScore;
minMaxLoc(classes_scores, 0, &maxClassScore, 0, &class_id);
if (maxClassScore > cof_threshold) {
class_scores.push_back(maxClassScore);
class_ids.push_back(class_id.x);
float cx = output_buffer.at<float>(i, 0);
float cy = output_buffer.at<float>(i, 1);
float w = output_buffer.at<float>(i, 2);
float h = output_buffer.at<float>(i, 3);
int left = int((cx - 0.5 * w) * scale);
int top = int((cy - 0.5 * h) * scale);
int width = int(w * scale);
int height = int(h * scale);
cv::Mat mask_conf = output_buffer.row(i).colRange(84, 116);
mask_confs.push_back(mask_conf);
boxes.push_back(Rect(left, top, width, height));
}
}
//NMS
std::vector<int> indices;
NMSBoxes(boxes, class_scores, cof_threshold, nms_area_threshold, indices);
// -------- Visualize the detection results -----------
cv::Mat rgb_mask = cv::Mat::zeros(src.size(), src.type());
cv::Mat masked_img;
cv::RNG rng;
Mat dst_temp = src.clone();
for (size_t i = 0; i < indices.size(); i++)
{
// Visualize the objects
int index = indices[i];
int class_id = class_ids[index];
rectangle(dst_temp, boxes[index], colors_seg[class_id % 16], 2, 8);
std::string label = class_names[class_id] + ":" + std::to_string(class_scores[index]).substr(0, 4);
Size textSize = cv::getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, 0);
Rect textBox(boxes[index].tl().x, boxes[index].tl().y - 15, textSize.width, textSize.height + 5);
cv::rectangle(dst_temp, textBox, colors_seg[class_id % 16], FILLED);
putText(dst_temp, label, Point(boxes[index].tl().x, boxes[index].tl().y - 5), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 255, 255));
// Visualize the Masks
Mat m = mask_confs[i] * proto;
for (int col = 0; col < m.cols; col++) {
sigmoid_function(m.at<float>(0, col), m.at<float>(0, col));
}
cv::Mat m1 = m.reshape(1, 160); // 1x25600 -> 160x160
int x1 = std::max(0, boxes[index].x);
int y1 = std::max(0, boxes[index].y);
int x2 = std::max(0, boxes[index].br().x);
int y2 = std::max(0, boxes[index].br().y);
int mx1 = int(x1 / scale * 0.25);
int my1 = int(y1 / scale * 0.25);
int mx2 = int(x2 / scale * 0.25);
int my2 = int(y2 / scale * 0.25);
cv::Mat mask_roi = m1(cv::Range(my1, my2), cv::Range(mx1, mx2));
cv::Mat rm, det_mask;
cv::resize(mask_roi, rm, cv::Size(x2 - x1, y2 - y1));
for (int r = 0; r < rm.rows; r++) {
for (int c = 0; c < rm.cols; c++) {
float pv = rm.at<float>(r, c);
if (pv > 0.5) {
rm.at<float>(r, c) = 1.0;
}
else {
rm.at<float>(r, c) = 0.0;
}
}
}
rm = rm * rng.uniform(0, 255);
rm.convertTo(det_mask, CV_8UC1);
if ((y1 + det_mask.rows) >= dst_temp.rows) {
y2 = dst_temp.rows - 1;
}
if ((x1 + det_mask.cols) >= dst_temp.cols) {
x2 = dst_temp.cols - 1;
}
cv::Mat mask = cv::Mat::zeros(cv::Size(dst_temp.cols, dst_temp.rows), CV_8UC1);
det_mask(cv::Range(0, y2 - y1), cv::Range(0, x2 - x1)).copyTo(mask(cv::Range(y1, y2), cv::Range(x1, x2)));
add(rgb_mask, cv::Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), rgb_mask, mask);
addWeighted(dst_temp, 0.5, rgb_mask, 0.5, 0, masked_img);
}
dst = masked_img.clone();
return true;
}
// =====================姿态========================//
bool YoloModel::LoadPoseModel(const string& xmlName, string& device)
{
//待优化,如何把初始化部分进行提取出来
// -------- Step 1. Initialize OpenVINO Runtime Core --------
ov::Core core;
// -------- Step 2. Compile the Model --------
compiled_model_Pose = core.compile_model(xmlName, device);
// -------- Step 3. Create an Inference Request --------
infer_request_Pose = compiled_model_Pose.create_infer_request();
return true;
}
bool YoloModel::YoloPoseInfer(const Mat& src, double cof_threshold, double nms_area_threshold, Mat& dst, vector<Object>& vecObj)
{
// -------- Step 4.Read a picture file and do the preprocess --------
// Preprocess the image
Mat letterbox_img;
letterbox(src, letterbox_img);
float scale = letterbox_img.size[0] / 640.0;
Mat blob = blobFromImage(letterbox_img, 1.0 / 255.0, Size(640, 640), Scalar(), true);
// -------- Step 5. Feed the blob into the input node of the Model -------
// Get input port for model with one input
auto input_port = compiled_model_Pose.input();
// Create tensor from external memory
ov::Tensor input_tensor(input_port.get_element_type(), input_port.get_shape(), blob.ptr(0));
// Set input tensor for model with one input
infer_request_Pose.set_input_tensor(input_tensor);
// -------- Step 6. Start inference --------
infer_request_Pose.infer();
// -------- Step 7. Get the inference result --------
auto output = infer_request_Pose.get_output_tensor(0);
auto output_shape = output.get_shape();
std::cout << "The shape of output tensor:" << output_shape << std::endl;
// -------- Step 8. Postprocess the result --------
float* data = output.data<float>();
Mat output_buffer(output_shape[1], output_shape[2], CV_32F, data);
transpose(output_buffer, output_buffer); //[8400,56]
std::vector<int> class_ids;
std::vector<float> class_scores;
std::vector<Rect> boxes;
std::vector<std::vector<float>> objects_keypoints;
// //56: box[cx, cy, w, h] + Score + [17,3] keypoints
for (int i = 0; i < output_buffer.rows; i++) {
float class_score = output_buffer.at<float>(i, 4);
if (class_score > cof_threshold) {
class_scores.push_back(class_score);
class_ids.push_back(0); //{0:"person"}
float cx = output_buffer.at<float>(i, 0);
float cy = output_buffer.at<float>(i, 1);
float w = output_buffer.at<float>(i, 2);
float h = output_buffer.at<float>(i, 3);
// Get the box
int left = int((cx - 0.5 * w) * scale);
int top = int((cy - 0.5 * h) * scale);
int width = int(w * scale);
int height = int(h * scale);
// Get the keypoints
std::vector<float> keypoints;
Mat kpts = output_buffer.row(i).colRange(5, 56);
for (int i = 0; i < 17; i++) {
float x = kpts.at<float>(0, i * 3 + 0) * scale;
float y = kpts.at<float>(0, i * 3 + 1) * scale;
float s = kpts.at<float>(0, i * 3 + 2);
keypoints.push_back(x);
keypoints.push_back(y);
keypoints.push_back(s);
}
boxes.push_back(Rect(left, top, width, height));
objects_keypoints.push_back(keypoints);
}
}
//NMS
std::vector<int> indices;
NMSBoxes(boxes, class_scores, cof_threshold, nms_area_threshold, indices);
dst = src.clone();
// -------- Visualize the detection results -----------
for (size_t i = 0; i < indices.size(); i++) {
int index = indices[i];
// Draw bounding box
rectangle(dst, boxes[index], Scalar(0, 0, 255), 2, 8);
std::string label = "Person:" + std::to_string(class_scores[index]).substr(0, 4);
Size textSize = cv::getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, 0);
Rect textBox(boxes[index].tl().x, boxes[index].tl().y - 15, textSize.width, textSize.height + 5);
cv::rectangle(dst, textBox, Scalar(0, 0, 255), FILLED);
putText(dst, label, Point(boxes[index].tl().x, boxes[index].tl().y - 5), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 255, 255));
// Draw keypoints
//std::vector<float> object_keypoints = objects_keypoints[index];
//for (int i = 0; i < 17; i++)
//{
// int x = std::clamp(int(object_keypoints[i * 3 + 0]), 0, dst.cols);
// int y = std::clamp(int(object_keypoints[i * 3 + 1]), 0, dst.rows);
// //Draw point
// circle(dst, Point(x, y), 5, posePalette[i], -1);
//}
// Draw keypoints-line
}
cv::Size shape = dst.size();
plot_keypoints(dst, objects_keypoints, shape);
return true;
}
void YoloModel::letterbox(const cv::Mat& source, cv::Mat& result)
{
int col = source.cols;
int row = source.rows;
int _max = MAX(col, row);
result = Mat::zeros(_max, _max, CV_8UC3);
source.copyTo(result(Rect(0, 0, col, row)));
}
void YoloModel::sigmoid_function(float a, float& b)
{
b = 1. / (1. + exp(-a));
}
void YoloModel::plot_keypoints(cv::Mat& image, const std::vector<std::vector<float>>& keypoints, const cv::Size& shape)
{
int radius = 5;
bool drawLines = true;
if (keypoints.empty()) {
return;
}
std::vector<cv::Scalar> limbColorPalette;
std::vector<cv::Scalar> kptColorPalette;
for (int index : limbColorIndices) {
limbColorPalette.push_back(posePalette[index]);
}
for (int index : kptColorIndices) {
kptColorPalette.push_back(posePalette[index]);
}
for (const auto& keypoint : keypoints) {
bool isPose = keypoint.size() == 51; // numKeypoints == 17 && keypoints[0].size() == 3;
drawLines &= isPose;
// draw points
for (int i = 0; i < 17; i++) {
int idx = i * 3;
int x_coord = static_cast<int>(keypoint[idx]);
int y_coord = static_cast<int>(keypoint[idx + 1]);
if (x_coord % shape.width != 0 && y_coord % shape.height != 0) {
if (keypoint.size() == 3) {
float conf = keypoint[2];
if (conf < 0.5) {
continue;
}
}
cv::Scalar color_k = isPose ? kptColorPalette[i] : cv::Scalar(0, 0,
255); // Default to red if not in pose mode
cv::circle(image, cv::Point(x_coord, y_coord), radius, color_k, -1, cv::LINE_AA);
}
}
// draw lines
if (drawLines) {
for (int i = 0; i < skeleton.size(); i++) {
const std::vector<int>& sk = skeleton[i];
int idx1 = sk[0] - 1;
int idx2 = sk[1] - 1;
int idx1_x_pos = idx1 * 3;
int idx2_x_pos = idx2 * 3;
int x1 = static_cast<int>(keypoint[idx1_x_pos]);
int y1 = static_cast<int>(keypoint[idx1_x_pos + 1]);
int x2 = static_cast<int>(keypoint[idx2_x_pos]);
int y2 = static_cast<int>(keypoint[idx2_x_pos + 1]);
float conf1 = keypoint[idx1_x_pos + 2];
float conf2 = keypoint[idx2_x_pos + 2];
// Check confidence thresholds
if (conf1 < 0.5 || conf2 < 0.5) {
continue;
}
// Check if positions are within bounds
if (x1 % shape.width == 0 || y1 % shape.height == 0 || x1 < 0 || y1 < 0 ||
x2 % shape.width == 0 || y2 % shape.height == 0 || x2 < 0 || y2 < 0) {
continue;
}
// Draw a line between keypoints
cv::Scalar color_limb = limbColorPalette[i];
cv::line(image, cv::Point(x1, y1), cv::Point(x2, y2), color_limb, 2, cv::LINE_AA);
}
}
}
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
# 1.2 ov_yolov8.h
#pragma once
#ifdef OV_YOLOV8_EXPORTS
#define OV_YOLOV8_API _declspec(dllexport)
#else
#define OV_YOLOV8_API _declspec(dllimport)
#endif
#include <iostream>
#include <string>
#include <vector>
#include <algorithm>
#include <random>
#include <openvino/openvino.hpp> //openvino header file
#include <opencv2/opencv.hpp> //opencv header file
using namespace cv;
using namespace std;
using namespace dnn;
// 定义输出结构体
typedef struct {
float prob;
cv::Rect rect;
int classid;
}Object;
//定义类
class OV_YOLOV8_API YoloModel
{
public:
YoloModel();
~YoloModel();
//检测
bool LoadDetectModel(const string& xmlName, string& device);
bool YoloDetectInfer(const Mat& src, double cof_threshold, double nms_area_threshold, Mat& dst, vector<Object>& vecObj);
//分类
bool YoloClsInfer(const Mat& src, double cof_threshold, double nms_area_threshold, Mat& dst, vector<Object>& vecObj);
bool LoadClsModel(const string& xmlName, string& device);
//分割
bool LoadSegModel(const string& xmlName, string& device);
bool YoloSegInfer(const Mat& src, double cof_threshold, double nms_area_threshold, Mat& dst, vector<Object>& vecObj);
//姿态
bool LoadPoseModel(const string& xmlName, string& device);
bool YoloPoseInfer(const Mat& src, double cof_threshold, double nms_area_threshold, Mat& dst, vector<Object>& vecObj);
private:
ov::InferRequest infer_request_Detect;
ov::CompiledModel compiled_model_Detect;
ov::InferRequest infer_request_Cls;
ov::CompiledModel compiled_model_Detect_Cls;
ov::InferRequest infer_request_Seg;
ov::CompiledModel compiled_model_Seg;
ov::InferRequest infer_request_Pose;
ov::CompiledModel compiled_model_Pose;
//增加函数
// Keep the ratio before resize
void letterbox(const Mat& source, Mat& result);
void sigmoid_function(float a, float& b);
void plot_keypoints(cv::Mat& image, const std::vector<std::vector<float>>& keypoints, const cv::Size& shape);
};
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
# 2.Batch_Test
# 2.1 Batch_Test.cpp
#include <iostream>
#include "ov_yolov8.h"
#pragma comment(lib,"..//x64//Release//OV_YOLOV8_DLL.lib")
int main(int argc, char* argv[])
{
YoloModel yolomodel;
string xmlName_Detect = "./yolov8/model/yolov8n.xml";
string xmlName_Cls = "./yolov8/model/yolov8n-cls.xml";
string xmlName_Seg = "./yolov8/model/yolov8n-seg.xml";
string xmlName_Pose = "./yolov8/model/yolov8n-Pose.xml";
string device = "GPU";
bool initDetectflag = yolomodel.LoadDetectModel(xmlName_Detect, device);
bool initClsflag = yolomodel.LoadClsModel(xmlName_Cls, device);
bool initSegflag = yolomodel.LoadSegModel(xmlName_Seg, device);
bool initPoseflag = yolomodel.LoadPoseModel(xmlName_Pose, device);
if (initDetectflag == true)
{
cout << "检测模型初始化成功" << endl;
}
if (initClsflag == true)
{
cout << "分类模型初始化成功" << endl;
}
if (initSegflag == true)
{
cout << "分割模型初始化成功" << endl;
}
if (initPoseflag == true)
{
cout << "姿态模型初始化成功" << endl;
}
// 读取图像
Mat img_Detect = cv::imread("./yolov8/img/bus.jpg");
Mat img_Cls = img_Detect.clone();
Mat img_Seg = img_Detect.clone();
Mat img_Pose = img_Detect.clone();
// 检测推理
Mat dst_detect;
double cof_threshold_detect = 0.25;
double nms_area_threshold_detect = 0.5;
vector<Object> vecObj = {};
bool InferDetectflag = yolomodel.YoloDetectInfer(img_Detect, cof_threshold_detect, nms_area_threshold_detect, dst_detect, vecObj);
// 分类推理
Mat dst_cls;
double cof_threshold_Cls = 0.25;
double nms_area_threshold_Cls = 0.5;
vector<Object> vecObj_cls = {};
bool InferClsflag = yolomodel.YoloClsInfer(img_Cls, cof_threshold_Cls, nms_area_threshold_Cls, dst_cls, vecObj_cls);
// 分割推理
Mat dst_seg;
double cof_threshold_Seg = 0.25;
double nms_area_threshold_Seg = 0.5;
vector<Object> vecObj_seg = {};
bool InferSegflag = yolomodel.YoloSegInfer(img_Seg, cof_threshold_Seg, nms_area_threshold_Seg, dst_seg, vecObj_seg);
// 姿态推理
Mat dst_pose;
double cof_threshold_Pose = 0.25;
double nms_area_threshold_Pose = 0.5;
vector<Object> vecObj_Pose = {};
bool InferPoseflag = yolomodel.YoloPoseInfer(img_Pose, cof_threshold_Pose, nms_area_threshold_Pose, dst_pose, vecObj_Pose);
namedWindow("dst_pose", WINDOW_NORMAL);
//imshow("dst_detect", dst_detect);
imshow("dst_pose", dst_pose);
waitKey(0);
destroyAllWindows();
return 0;
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
# 3. 完整工程
https://download.csdn.net/download/qq_44747572/88580524 (opens new window)
本文来自本人CSDN博客:【模型c++部署】yolov8(检测、分类、分割、姿态)使用openvino进行部署-CSDN博客 (opens new window)
本文转自 https://zhuanlan.zhihu.com/p/670618199 (opens new window),如有侵权,请联系删除。
编辑 (opens new window)